
ArduPilot发展报告
2021.12
Andrew Tridgell 和 Randy Mackay 及AP开发团队
一、数据统计
上个月在我们的github存储库中看到中等水平的活动:
- 475个补丁影响27k行代码,89个wiki更新
- 61位贡献者
- 两场定期由20多名人员组成的每周开发会议
二、驱动程序的更改
本月我们看到了以下传感器和系统驱动程序的变化:
-
使用GSF合并新的飞行时罗盘校准系统
-
允许脚本子系统在不重启的情况下重新启动
-
对不活动的AHRS后端进行宽松的解锁检查
-
支持更多INA2xx电池监视器类型
-
增加了对Pixhawk5X的支持
-
禁用未使用的RX/TX引脚修复RC地电压上拉问题
-
修复EKF切换到非零EK3_PRIMARY
-
为飞机特技增加了NAV_SCRIPT_TIME的支持
-
修复了固定翼着陆坡度计算的bug
-
增加对AIRLink板的支持
-
支持@SYS / storage.bin下载
-
支持SERIAL2和SERIAL3的Cube Orange引导加载程序
-
增加固定翼AUTOTUNE RC选项
-
支持AK09915指南针
-
在AUTOTUNE模式下抽动时的零压摆率
-
将Dijkstras转换为A-star以进行避障
-
改进相机反馈报告的时间
-
增加调整模拟电压偏移的BATTn_VLT_OFFSET参数
-
增加了lua脚本的日志记录
-
修正了飞机上降落伞释放的bug
-
支持DJI快速SBUS
-
改进了激光雷达处理的范围
-
修复空速亲和力传感器切换
-
支持北醒CAN激光雷达
-
重命名罗盘参数以获得更大的一致性
-
增加了飞机偏航率控制器

AIRLink Autopilot

三、 多旋翼更新
多旋翼-4.1.1 发布,4.1.2-rc1 进行beta测试中
在4.1.2版本修复和增强内容包括:
-
添加CAN_Dn_UC_OPTION参数以解决DNA冲突
-
支持FETtec One ESC 协议
-
在某些载板上修复APM/LOGS目录创建
-
如果测距仪出现故障,修复表面跟踪
即将到来的项目:
-
用于OA、Visual Follow-me、PrecLand 的 Luxonis OAK-D IoT 75集成
-
TradHeli自动调参
-
起飞的改善
-
4.2 beta测试计划在1月初开始

Luxonis OAK-D IoT 75

四、 垂直起降机的更新
已发布垂起4.1.4稳定版:
一、稳定的4.1.x 终于发布了
-
修正降落伞释放的bug
-
添加 QRTL 作为 RCn_OPTION选项
-
防止Q_VFWD数值堆积
-
改进了垂直起降降落的POS1速度
-
允许更大的Q_A_THR_MIX参数范围
二、4.1.5搁置中
- 调整到AUTOTUNE P增益处理
- 修复了处理旧地理围栏协议的错误


Eric Maglio的 F-35B VTOL


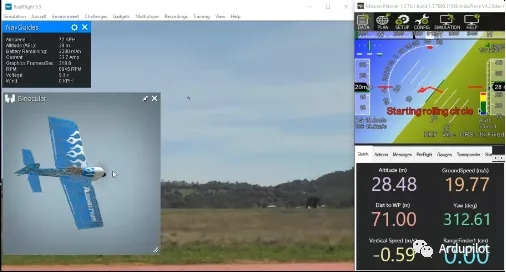
五、 自主特技飞行
我们增加了对固定翼自主特技飞行的支持
-
所有这些都由lua脚本控制
-
能够建立一个完整的特技动作
作为一个任务环,轴向辊,滚圆,立方-8,上线,方环
- 旨在为F3A比赛提供特技飞行表演

六、无人车/船更新
rover-4.1.1 发布,4.1.2-rc1 进行beta测试中
与多旋翼和垂起固定翼同时发布
即将到来的项目:
S-Curves
数字MPPT(太阳能电池板控制器)
支持ePropulsion 电机

完成长距离任务!

ePropulsion Spirit

数字MPPT板