此教程全文干货,篇幅较长,请耐心阅读。特别感谢K大(Kris)编写此教程,并授权赫星发布。
VTOL 组装教程 开箱
赫星控制器一套 / 宇燕(Yuyan)垂直起降飞机一架

组装完成图
翼展:2.3M 机身长: 1.3M 翼面积:66dm
重量:5.7Kg(不含电池及酬载) 标准起飞重量:9Kg 最大起飞重量:11Kg
航程:90分钟/100KM (电池6S 25000mAh+A5100x5镜头),起飞重量=9Kg

VTOL 组装教程 - 开箱 (Cube-H7)
赫星 控制器 :
CUBE Orange(H7) / Here2 GPS / HereLink

CUBE Orange(H7)
STM32H753VIT6 主处理器:双精度浮点运算单元+闪存2Mb+内存1Mb+主频400MHz
STM32F100 协处理器:进阶故障保护 / 看门狗
载板内置ADS-B 接收机:民航机自动避让系统

VTOL 组装教程 - 开箱 (Cube-H7)
** CUBE Orange(H7)** 配件
注意:图中的电源模块持续电流只有30A,无法用于电流>100A的VTOL,请改用霍尔式电源模块.

CUBE Orange(H7) 拆壳

VTOL 组装教程 - 开箱 (Cube 载板 )
CUBE 载板正面

CUBE 载板背面

VTOL 组装教程 - Cube 接口定义图

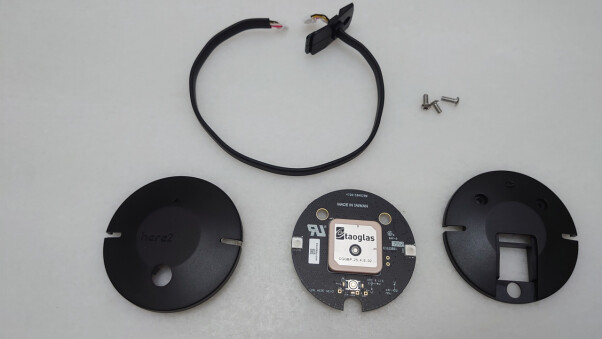
VTOL 组装教程 - 开箱 (GPS)
** Here GPS**
CANBUS 及 Serial两用 / 内置RGB LED, 罗盘, 安全开关

VTOL 组装教程 - 开箱 (HereLink)
HereLink
遥控/高清图传/数传 一体


拆箱后的所有零件

接线示意图



VTOL 组装教程 - 开箱 ( 宇燕 VTOL)
宇燕垂直起降空机



假组装

电池舱/酬载舱都蛮大的

伞舱下方是放控制器的

VTOL 组装教程 - 载机组装 ( 机臂 )
这架空机出货时已经组装好机身了,只要把动力系统及控制系统装上就行了,组装过程就机臂比较麻烦.
机臂组成
零件:复合材料机臂/电调/电机/倾转舵机/快拆接头

焊好电调与电机之间的线,有金插的就用金插,没有就用焊的.

VTOL 组装教程 - 载机组装 ( 机臂 )
固定好倾转舵机及电机 , 这边没什么好说的 , 螺丝锁上而已 .
前电机规格为U7(相当于5212吧!请自行对照),KV为订制的480/520/560KV其中之一(因为没标示我也搞混了,依据灰尘堆积程度,猜测是第一次订制的480KV),电调为好盈6S 60A
注意:螺丝要上螺丝胶

组装完成的前电机(背面)

VTOL 组装教程 - 载机组装 ( 机臂 )
组装完成的前电机(正面)

后电机组装
后电机规格为U7 340KV,电调为好盈6S 60A

VTOL 组装教程 - 载机组装 ( 机臂 )
焊接快拆接头,这边要注意别加热太久,否则固定金插的塑料会熔掉,插上时可能脱离.

机臂组装完成

左右机臂组装完成,我故意公母头颠倒是为了防呆,以免自己左右机臂搞混插错

左右机臂组装完成

VTOL 组装教程 - 载机组装 ( 机翼 )
安装好副翼舵机/拉杆,角度可以先用舵机测试器调整后确定,中立点PWM=1500

机翼上的倾转舵机/副翼舵机是由一个7.0V 5A的BEC供电,所以电源在这边引出

焊好与机臂对接的快拆接头,线材使用12AWG

焊好与机身对接的快拆接头

VTOL 组装教程 - 载机组装 ( 机身 )
焊好机身与机翼对接的快拆接头,线材我是用14AWG两条并联当一条用(比较软易折弯)

焊接好的快拆接头

锁上快拆接头并开始整线

将左右机翼快拆接头的电源线合并再引出XT90接头
注意:霍尔电流传感器别忘了要事先穿在正极中间且注意方向标示,BEC也别忘了焊上去.

把所有线整理好并确定不会干涉到相机的安装
注意:相机的 PPK天线/电源/热靴线/快门触发线/HDMI线 能事先布置好就先布好.

把接头都压接好,如果有线不够长(空速计I2C/电源模块/…)则焊接延长.
注意:GPS也可放底下舱内,我摆这位置只是方便看RGB LED灯号,但不方便拆盖.

固定好升降舵机/尾舵机,且安装好拉杆,一样用舵机测试器调好中立点PWM=1500
注意:尾舵机连杆的内螺丝要上螺丝胶

把控制器装上且插上接头,要不要减震都可以,我是双面胶直接贴上
组装完成图



VTOL 组装教程 - 控制器设置
固件安装 / 加速度校准 / 遥控器校准 / 罗盘校准 / 空速校准 /… 这些基础的 , 请看底下这个教程 .
中文版 : 垂直起降固定翼 中文教程
English: VTOL tutorial
接下来的教程仅针对Cube_Orange/HereLink/宇燕载机
相同配置的载机只要按表输入参数就可以了
![]()
Cube Orange(H7)CANBUS 设置
首先将Cube Orange按照下表将CAN启用(包括CAN GPS/罗盘/RGB LED),启用后记得重新开机!
如果重新开机发现GPS上的LED亮了就表示CAN已启用成功.

Cube Orange(H7)罗盘设置
罗盘ID=97539是CAN外置罗盘(在GPS内),另一个ID是板载内置罗盘,内置罗盘易受两翼机臂电流影响而干扰,在VTOL都是设为禁用的,也可以再装一个GPS增加冗余(2个GPS+2个外置罗盘).
其中比较重要的是COMPASS_PRIO1_ID把它改为97539(改完要重新开机且做罗盘校正),将CAN罗盘指定为第一顺位,且COMPASS_EXTERNAL=1(第一个罗盘为外置),COMPASS_USE=1(启用第1个罗盘,其它罗盘则设0关闭).
注意:如果一直无法校准成功(进度条跑到100%又从0开始),可以尝试:
1.可能你的罗盘COMPASS_DEV_ID及ID2跟下图颠倒,则COMPASS_PRIO1_ID请设为COMPASS_DEV_ID,COMPASS_PRIO2_ID则设为COMPASS_DEV_ID2,COMPASS_EXTERNAL=0,COMPASS_EXTERNAL2=1,COMPASS_USE=0
也就是跟着颠倒的意思.
2.或是COMPASS_PRIO1_ID及COMPASS_PRIO2_ID都设0,由系统自动侦测.
然后再重新启动做一次罗盘校准.

Cube Orange(H7) 电源模块设置
注意:
*这个电源是 风迅2-12S 180A霍尔传感器,并不是赫星附的(那个持续30A远远不够)
*首次设置不会出现底下参数,请先将BATT_MONITOR=4并重新启动


Cube Orange(H7) ADS-B 设置
赫星的载板ADS-B接收机是接在Serial5上,所以设置好Serial5并经由SR0(USB)/SR1&2(数传1&2)广播给地面站显示附近的民航机.

设置正确后就会在地面站看到附近的民航机,再设置自动避让参数做避让的动作.
也可以跟https://www.flightradar24.com/ 显示的航班进行比较.

Cube Orange(H7) ADS-B 民航机避让设置
AVD_ENABLE:设置为1以启用ADS-B的回避(设置此参数后请重新启动)
AVD_F_DIST_XY :允许接近的水平距离(单位为M)
AVD_F_DIST_Z:允许接近的垂直距离(单位为M)
AVD_F_TIME:提前几秒做避让的动作(基于当前位置和速度下去计算)
AVD_F_ACTION :如何避让(0=不避让/1=仅回报/2=爬升或下降/3=水平移动/4=垂直3D移动/5=RTL/6=悬停)
AVD_F_RCVRY:避让完成后(0=保持/1=恢复之前的飞行模式/2=RTL/3=继续AUTO任务)

Cube Orange(H7) 空设计设置
I2C空速计请按下表设置,如果设置正确,当你用手压迫空速软管,会看到地面站显示一个很大的空速值,如果没有变化请勿升空.
首次测试定翼模式请先把ARSP_AUTOCAL=1启用空速校准,升空转换成功后以FBWA模式飞下,如果正常则切到LOITER(绕圈)模式让它飞个几分钟,它会自动校准空速,校准完成且降落后再把ARSP_AUTOCAL改回0.

Cube Orange(H7) 舵机 / 电调设置
接线图

参数表
SERVO1_FUNCTION=4
SERVO2_FUNCTION=4
SERVO3_FUNCTION=19
SERVO4_FUNCTION=21
SERVO5_FUNCTION=76
SERVO6_FUNCTION=75
SERVO7_FUNCTION=0
SERVO8_FUNCTION=0
SERVO9_FUNCTION=33
SERVO10_FUNCTION=34
SERVO11_FUNCTION=35
SERVO12_FUNCTION=36
SERVO13_FUNCTION=10
SERVO14_FUNCTION=0
SERVO15_FUNCTION=0
SERVO16_FUNCTION=0
SERVO17_FUNCTION=0
SERVO18_FUNCTION=0
SERVO19_FUNCTION=0
SERVO20_FUNCTION=0
Cube Orange(H7) 相机快门触发设置

Cube Orange(H7) 开机被重置参数的解决方法
如果您曾经开机参数被莫名重置而恢复为默认参数,且罗盘老是校准不过(进度条跑到100%又由0%重新开始),请按照底下方法重刷bootloader(硬件引导程序)
[1]. 刷最新版本固件 , 有两种方法 .
a.下载官方最新的多轴固件,这个一定没问题,因为版本是最新的,按右键选[另存目标]下载 ArduCopter.apj ArduPilot firmware : /Copter/latest/CubeOrange
注意:这个方法待刷完bootloader且重新开机后,就可以刷回你原本使用的固件而不会影响到已经刷进去的bootloader.

b.刷群(QQ群305970641)固件最新版本(版本日期务必大于2020-05-18才有新的bootloader),刷好后到步骤[2].
[2] 以电脑 USB 连线 , 并进入 [ 初始设置 ]->[ 安装固件 ]-> 刷 bootloader 页面 .

[3] 点选 Bootloader Update 会出现警告 :
询问是否请问确定要刷,因为刷bootloader有风险,如果搞错步骤或突然断电,您的控制器有可能变砖(其实只是没专用烧写工具用USB刷不了,如果不幸发生寄回厂家处理)
请按 是[Yes]

[4] 再问你一次是否确定 ?
并告知可能变砖,而且刷写过程要5分钟!!
请按 是[Yes]

[5] 刷 Bootloader 完成
其实刷写只要1秒,按OK后完成,重新开机

VTOL 组装教程 - 视频演示
Takeoff
https://www.youtube.com/watch?v=e6s7hNB269U
Auto