
ArduPilot发展报告
2022.3
Andrew Tridgell 和 Randy Mackay 及AP开发团队
一、数据统计
上个月在我们的github存储库中看到中等水平的活动:
- 483个补丁影响25k行代码,113个wiki更新
- 48位贡献者
- 两场定期由20多名人员组成的每周开发会议
二、驱动程序的更改
本月我们看到了以下传感器和系统驱动程序的变化:
-
针对直升机的新的自动调参系统
-
增加ARK GPS外围设备
-
添加了强制飞行遥控开关选项
-
在EKF 拒绝空速融合时禁用空速计
-
增加了风向标控制的遥控选项
-
分离MatekF405空速外设
-
改进了S-Curve路径对小型输入的响应
-
添加了DLVR空速完整性检查
-
改进了对外部闪存板的支持
-
添加了CAN通过MAVLink过滤支持
-
支持多协议外设上的CAN/I2C切换
-
提高ccache效率,减少编译时间
-
自动调参轴完成时输出增益
-
支持在直升机上启动涡轮机
-
在 H750上支持480MHz时钟
-
支持用于报警的PWM引脚
-
添加了闪存写入保护和清除选项
(SpracingH7)

三、多旋翼更新
多旋翼-4.1.5 版本发布
- 修复着陆时姿态控制I-term l累积(主要影响 tradheli)
- 恢复可能导致 FrSky 接收器问题的SBUS RC帧差距
多旋翼-4.2.0 beta测试版本启用
- 新的自动驾驶仪包括 ModalAI, KakuteH7
- 自定义编译服务器
- 外部AHRS/EKF, 光流模块的更新
- DroneCAN GPS的GPS偏航
- 暂停和继续任务等等!
Rover-4.2.0 beta测试版本启用

六旋翼电机失败测试(由AtrracLab进行)
四、垂直起降机的更新
垂起4.1.7稳定版
垂起4.2.0beta1 已发布:
1、4.2.0 beta1:
- 主要版本,更新大多数子系统
- 主要改进尾座翼
- 船舶降落待定
- CANFD支持待定

OMP ZMO ArduPilot 转换


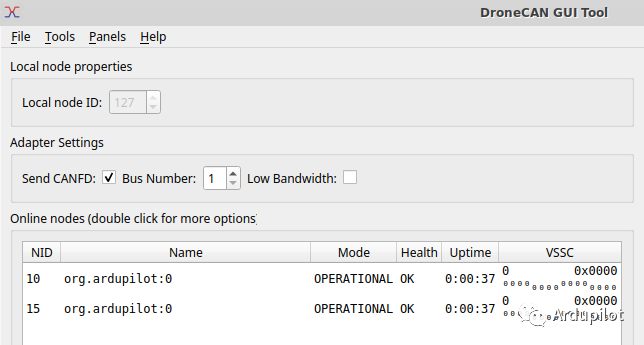
五、DroneCAN更新
新DroneCAN功能
1、支持CAN 通过MAVLink
- 通过遥测链接管理并更新DroneCAN设备
- 主要更新到DroneCAN GUI工具
- 支持CAN过滤
2、CANFD 支持待定
- 更快的数据处理速率(最大8MBit/s)
- 节点能力的自动协商



六、2022年开发会议
今年的开发者大会将再次在线上举行
- 会议为期3天:4月8日、9日、10日
- 欢迎所有开发人员和合作伙伴参加
- 欢迎技术开发性质的演讲! 联系Andrew Tridgell进行演讲安排

2021年Matt Kear 演讲
END