作为新手用户
“不会使用”一定是你最担心的事情
而对我们来说
产品的使用与反馈
能够大幅度提升产品体验感
为了帮助你
我们为你准备了一份教程
来帮助你更好地了解产品

前期准备
1.飞控:橙色飞控Cube Orange+ADSB标准载板
2.GPS:Here3 CAN GNSS
3.数传:RFdesign 900x
4.遥控器:futabaT14SG
温馨提醒:为保障飞行安全,起飞前必须正确设置,并检查飞行模式,遥控器、电池以及地面站(GCS)故障保护。(本文篇幅较长,请耐心阅读。)

一、 遥控器 飞行模式设置
温馨提醒:起飞前必须确认拨杆对应的飞行模式,并且确保可以正常切换。
- 功能介绍
飞机可以通过飞控进行多种飞行模式切换。
- 操作步骤
1.首先在遥控器校准界面校准遥控器,拨动想要用作飞行模式切换的拨杆,并且牢记拨杆所对应的通道(RADIO)。(如果需要改变拨杆所对应的通道,具体操作方式可以根据遥控器厂商与型号,根据对应说明书进行设置)

2.在搜索栏输入FLTMODE_CH,通过调节此参数可以将特定通道赋予飞行模式切换的功能(例如,如果将此参数设置为5,那么5通道就可以用作飞行模式切换),之后写入参数。

3.在“飞行模式”界面尝试拨动用作飞行模式切换的拨杆,确认不同档位对应的位置,如下图:
(注:拨杆不同档位的PWM信号值对应不同的位置,如图所示,本文的一档,二挡和三挡分别对应飞行模式1,4和6)

选择完想要的飞行模式之后点击,保存模式。

4.为了安全起见,建议将某个拨杆设置为一键返航。(这里使用SF位置两段式位拨杆作为RTL模式的一键切换。由于两段式开关只有两个对应档位,开启和关闭,所以发生紧急情况时,只需要快速拨动开关,就可以开启一键返航。)
5.在全部参数表的搜索栏中输入rc6_option,更改RC6对应的功能后,写入参数。

(遥控器设置RC5为飞行模式切换,RC6为一键返航)
6.更改完之后可以在飞行模式界面拨动拨杆,检查飞行模式的切换。

二、 ****遥控器(RC ) 故障 保护
温馨提醒:保护机制设置完成后,必须通过本段结尾处的地面测试并且获得正确的测试结果后,方能试飞。
- 功能介绍
在飞行时,如果飞控通过接收机收到的油门值(信号)低于故障保护的预设值时,飞控就会自动触发遥控器故障保护。市面上大多数的遥控器在与接收机失去连接后,接收机会呈现无信号(也就是没有油门值)的状态。当油门值就会低于THR_FS_VALUE(预设的遥控器故障保护油门值)的时候,遥控器(RC)故障保护就会根据预设的动作对飞机进行故障保护。
在飞入故障保护状态时,飞机会忽视所有除了油门值(此信号为故障保护的判定标准)以外的信号。
需要注意的是,故障保护油门值需要高于操作时的最低油门值,这样就不会在操作的时候触发故障保护**。** (故障保护的触发值可设定范围是925-2200)
(温馨提示:虽然上文有提及,市面上大多数接收机在失去信号之后呈现无油门值(0)的状态。但是一些早期的接收机在失去连接之后,会将所有信号值,滚转,俯仰和偏航保持在失去信号之前的状态,油门值降到最低值,而不是0。例如:如果老款接收机的最低油门值950,那么正常情况下,遥控失去信号时,接收机依旧会保持950的油门值。这样是无法触发故障保护的,我们可以将故障保护油门值设置为960,然后油门微调增加30。这样的话,在操作的时候,飞机的最低油门值就是980(950+30),略高于故障保护值,不会触发故障保护。当接收机失去遥控信号时,油门值便会降至950,即可触发失控保护。)
- 操作步骤
1.开启失控保护:首先我们需要将THR_FAILSAFE的参数修改至1,以开启故障保护功能。

2.设置触发保护油门值:设定故障保护的触发油门值THR_FS_VALUE需低于最低油门值(最低油门值就是油门杆拨至最低时的油门数值)
当飞机在飞行时,假设检测到接收到的油门值低于预设油门值时,飞控会自动判定飞机开始遥控器故障保护的状态,从此刻开始,我们可以根据飞机遥控器故障时间的长短,来设置不同的保护动作。

(此处最低油门值为1095)
3.故障保护的触发时间以及对应保护动作
- 第一阶段:短时间故障保护
若飞控检测不到遥控器信号超过FS_SHORT_TIMEOUT所设定的时间,飞控会开启第一阶段故障保护并按照FS_SHORT_ACTN预设的指令来进行保护动作。(同时地面站或者预设过的OSD上会显 示相关信息,提示故障保护开启)

注意:飞机在触发第一阶故障保护后,若能在第二阶段故障保护被触发前恢复遥控信号,那么飞行模式会从预设的保护动作回到第一阶段故障保护前的飞行模式。
例如,将第一阶段故障保护时间为2秒,保护动作为盘旋,长时间故障保护为8秒。在飞机失去遥控器信号的第2秒,飞控会触发预设保护指令,并且开始盘旋。若遥控信号在第一阶段失控保护被触发后,8秒内得以恢复,那么飞机回到失控前的模式继续飞行。
第二阶段:长时间故障保护
第二阶段故障保护会在第一阶段故障保护启动之后开始计时,若在预设时间内FS_LONG_TIMEOUT无法检测到遥控器信号,飞机会根据FS_LONG_ACTN预设的指令来进行保护动作。

在飞机处于长时间故障保护状态(预设指令)时,即使飞机的遥控器信号恢复,飞机仍会保持长时间故障保护设置的飞行状态,而不会恢复到故障保护之前的状态。
(注意:如果此时飞机触发了其他故障保护,例如电池低电保护,那么飞机会就会从遥控器故障保护所预设的飞行模式,切换到电池低电保护所预设的飞行模式)
例如:飞机在自动模式(AUTO)时触发了故障保护,且我们设定的故障保护指令为RTL(回到起始点)。那么即使当下遥控器可以重新连接而且油门值恢复正常状态,但飞机仍然会以RTL模式飞行。那么这个时候如果想要人为的方式让飞机继续执行任务可以通过以下两种办法,通过在地面站(GCS)上更改飞行模式
或者在遥控器上把先将飞机的飞行模式切换至任意模式,然后迅速切换回ATUO。
所有参数的详细定义,请查阅ArduPilot官网(本文使用的固件版本为4.17)
https://ardupilot.org/plane/docs/parameters-Plane-stable-V4.1.7.html
- 地面测试
温馨提醒:进行地面测试时,必须在连接电源之前拆除桨叶,并且将飞机放置在安全,水平的位置。
1.飞控连接电脑,写入相关参数之后,记录故障保护油门值以及长、短故障保护触发时间和触发后的保护动作。
2.飞控连接接收机,并且对频。
3.打开Mission Planner地面站,校对遥控器有信号并且检查所有行程。确保油门最低值必须大于THR_FS_VALUE。
4.检查飞行模式是否设置正确。
5.将Mission planner的界面切换至消息栏。
6.保持飞控与电脑的连接状态。
7.记录当前飞行模式(飞行模式不可和故障保护的飞行模式相同)
-
此时关闭遥控器,模拟丢失遥控器信号
-
当失去信号时间达预设的短时间故障时,界面上会显示短时间故障保护(short event)并且执行动作。

10.在长时间故障保护未被触发前,立即开启遥控器,飞机会恢复至故障保护前的飞行模式。

11.重新关闭遥控器,重复上一步骤,但此次不需要开启遥控器。

12.直至界面上出现长时间故障保护(Long event)开启并执行长时间故障保护的预设动作。

(遥控器重新连接之后飞行模式仍然会保持长时间故障保护的预设的保护动作)

注意:此处的type=2中,type指故障类型,2代表遥控器(RC)故障,Reason=3也可以代表代表遥控器(RC)故障,Flight mode=11,代表飞行模式为RTL。如果有需要,可以通过遥控或者地面站更改当前飞行模式
13.重新校对电调(ESC)(如果因为设置THR_FS_VALUE时更改了油门范围,必须重新校准)
三、地面站(GCS)故障保护
温馨提醒:所有保护机制在设置之后,必须成功完成本段结尾处的地面测试才能试飞。
- 功能介绍
无人机飞行时,通常飞控会使用数传设备,通过遥测技术(telemetry)和地面站(GSC)进行通信,查看飞控的回传数据,如当前电流,电压,高度,空速,姿态等,或飞行任务,机载设备等进行实时更改和操作。所以当飞控与地面站的信号传输中断时(例如飞机与地面站的距离超过数传的覆盖范围,地面站突然死机以及其他原因造成的数传故障)。
那么此时地面端便无法查看飞控的回传数据,同时也无法使用地面站(GSC)对飞行任务或机载设备进行调整和操作。
上下行数据的中断,会对飞行计划产生严重的影响,甚至可能造成安全隐患。这时可以用过设置地面站(GCS)故障保护的相关参数,在一定程度上避免或减轻这类隐患。
- 操作步骤
1.通过设置FS_GCS_ENABL来开启故障保护。(默认设置为1)

若将FS_GCS_ENABL设置为1,那么当飞机无法接收到MAVlink 的心跳信号(MAVLink HEARTBEAT message)时,便会触发故障保护。
若将FS_GCS_ENABL设置为2,那么当飞机无法接收到地面站的MAVlink 心跳信号(MAVLink HEARTBEAT message)时,或者地面站无法接收到来自飞控的数据更新(RADIO_STATUS message)时,便会触发故障保护。
若将FS_GCS_ENABL设置为3,情况和1相似,唯一的区别在于,若将此参数设置为3,那么只有在飞机处于AUTO模式,且无法接收到地面端的MAVlink 心跳信号(MAVLink HEARTBEAT message)时,才会触发故障保护。
2.在经过FS_LONG_TIMEOUT设定的倒计时之后,就会触发FS_LONG_ACTN 所设定的保护动作。

因为飞机的地面端信号覆盖半径是大于遥控器信号覆盖半径的。所以,当个别行业有特殊飞行需求时(比如飞行半径大于遥控器信号覆盖范围且在地面端信号覆盖范围内),为了防止遥控器(RC)故障保护的介入影响作业,我们可以将THR_FAILSAFE的值设置为2,遥控器失控保护处于关闭。这样即使飞控检测到遥控器连接故障,但若此时遥测信号仍然未中断时,那么飞机仍旧可以照常飞行,不会触发任何遥控器故障保护。
- 地面测试
温馨提醒:进行地面测试时,必须在连接电源之前拆除桨叶,并且将飞机放置在安全,水平的位置。
注意:由于此测试需要断开与地面站的连接,所以无法和其他测试一样在地面站软件中查看消息提示与相应动作。测试结果需要在测试结束后的飞行日志中查看。请确保飞控的内存卡安装正确,否则将无法查看相关日志。
此处使用的日志查看软件为MAVExplorer。
日志的查看软件,及使用方式,请参考以下链接:
https://ardupilot.org/copter/docs/common-logs.html
推荐使用Mission Planner或MAVExplorer
1.将飞机桨叶拆除,上电,并连接数传设备和遥控器
2.根据上文内容进行相关的参数设置,记下预设的故障保护行为与触发倒计时之后,保存修改后的参数
(此处将FS_GCS_ENABL设置为1故障保护行为设置为RTL,触发倒计时为5秒)
3.解锁飞机(此时飞控会开始记录日志)
4,断开地面端或飞机端的数传设备(模拟遥测信号丢失)
5.在倒计时时间结束之后,飞控会触发预设的故障保护动作。(可以在之后的日志中查看)
6.连接数传,待信号恢复之后将飞机锁定
7.将飞控与地面站连接,下载日志
8.查看日志,并确认飞控按照设定启用预设的故障保护程序

注意:此处的type=3中,type指故障类型,3代表地面站(GCS)故障。Reason=5也可以代表地面站(GCS)故障(fail safe)。Flight mode=11,代表飞行模式为RTL。
四、电池故障保护
温馨提醒:所有保护机制在设置完成之后,必须成功完成本段结尾处的地面测试才能试飞。
- 功能介绍
注意:设置电池保护前,需要保证飞控与电源之间配备有电源模块,并正确设置其参数。
当飞机电压或电量低于预设值时,飞控会根据电源模块的电池数据,进行预设的保护动作。
- 操作步骤
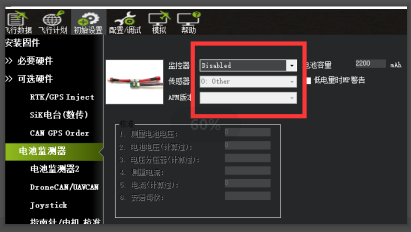
1.需要在电池监测器中设置电源模块
(注:电源模块需要根据厂商说明书在mission Planner中进行设置)


如果没有设定该部分,那么就无法显示并调节任何电池保护的相关参数。
安装了APM3.9及以上版本的飞控,可以实现低电和严重低电,两阶段的低电压保护。
2.第一阶段低电保护:
当电池电压低于预设值BATT_LOW_VOLT,或电池容量低于预设值时BATT_LOW_MAH
(推荐设置以电压为主的低电保护)

飞控会根据BATT_LOW_TIMER设置的时间开始倒计时,如果电池电压低于预设值的时间超过此预设时间,那么飞控准备执行低电保护动作。
(例如,BATT_LOW_TIMER为5秒,BATT_LOW_VOLT为11.2V,那么飞机在电压低于11.2V的状态下,持续飞行5秒之后,飞控就会触发低电保护)
![]()
设置低电保护倒计时的原因:
(例如,飞机在空中突然遇到强风,为了保持空速,电机会加快转速,此时电压可能会瞬间降到预设电压以下,所以需要合理的设置低电压保护倒计时,以免影响正常飞行计划)
当倒计时结束时,飞控会操控飞机执行BATT_FS_LOW_ACT所设置的指令。
![]()
3.第二阶段严重低电保护(根据实际需求选择是否设置)
当电池电压低于预设值BATT_CRT_VOLT,或电池容量低于预设值BATT_CRT_MAH。

当倒计时结束时,飞控会操控飞机执行BATT_FS_CRT_ACT所设置的严重低电保护动作。

- 地面测试
温馨提醒:进行地面测试时,必须在连接电源之前拆除桨叶,并且将飞机放置在安全,水平的位置。
1.设置一或二阶段电池低电保护(根据上文)
2.拆除桨叶
3.连接电池并解锁飞机
4.推油门,直到飞机电压降至预设电压以下。
(使用cube线材包中的蜂鸣器,电压降至第一阶段时会持续报警,直到飞机重新锁定)
5.观察地面站,查看消息栏的低电压提示
(此处只设置了一段电池低电保护,保护动作为RTL)
当电压持续低于预设值超过预设时间,便会触发低电保护。此时飞机会执行预设的保护动作,并且蜂鸣器会持续报警,直到飞机重新锁定。
注意:即使电压在触发保护动作之后回升至安全范围,飞机仍会执行预设的保护动作。

6.如果在低电故障保护触发后因为特殊原因,需切换飞行模式。可以在地面站或者遥控器上直接切换

7.第二个阶段的失控保护,此处未对第一阶段低电保护设置任何保护动作,所以当触发第一段阶段时,仅会触发蜂鸣器,并且地面站的提示。
当电压落至第二段阶时,飞机会执行预设的保护动作(此处设置为RTL)

8.在测试结束之后需要断电再重新上电。
如果有疑惑,欢迎留言讨论哦~